
Test Methods and Specimens
8.1 Introduction:
8.1.1 Three basic vibratory methods exist:
8.1.1.1 Forced vibration of a nonresonant system involving only the specimen,
8.1.1.2 Free vibration of a resonant system involving the specimen and a mass, and
8.1.1.3 Forced vibration of the above resonant system.
8.1.2 The first and third can be broken down further into two kinds of apparatus, those that impose a dynamic motion and those that impose a dynamic force. The imposed parameter could have any of the following wave shapes: sinusoidal, triangular, square, or random. In this guide we will assume that the imposed parameter is always sinusoidal.
8.1.3 In addition to the availability of three methods, there is also a choice of specimen geometry. Elastomers may be strained in:
8.1.3.1 Shear—May be single, double, or quad. Usually double, with two identical rubber elements symmetrically disposed on opposite sides of a central rigid member.
8.1.3.2 Compression—May be bonded, unbonded, or lubricated. 8.1.3.3 Tension.
8.1.3.4 Bending—May be fixed-free, fixed-fixed, fixedguided, or three-point bending of beams.
8.1.3.5 Torsion.
8.1.4 Some materials exhibit a large change in dynamic modulus with change in dynamic strain. In applications where this is important, attention should be paid to whether the specimen geometry and flexing method impose uniform strain throughout the body of the specimen, or whether the strain varies within the specimen.
8.2 Forced Nonresonant Vibration:
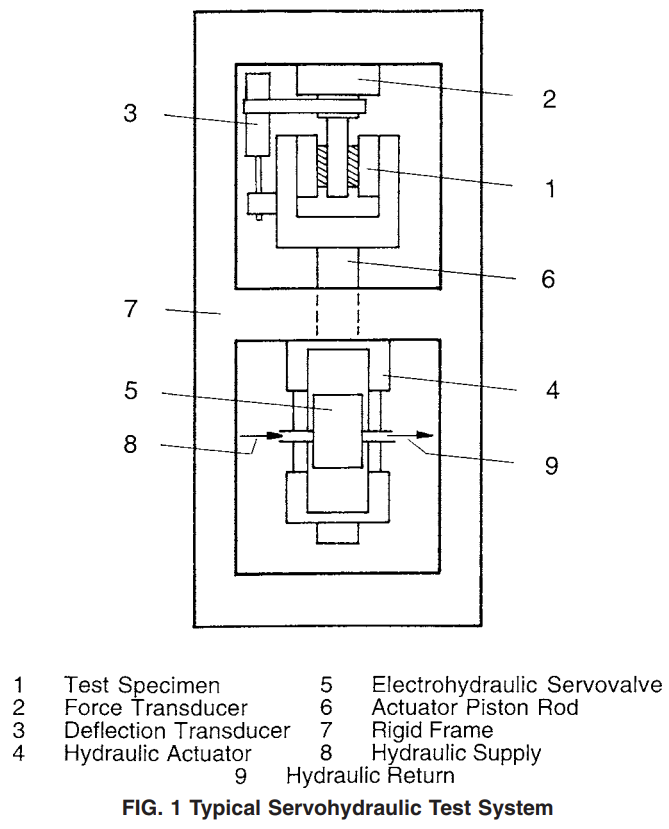
8.2.1 Forced nonresonant vibration offers the broadest frequency range of all methods. It can be accomplished with mechanical crank-and-link mechanisms, with electrodynamic linear force motors, and with servohydraulics. When done with electrodynamics or servohydraulics it adds ease of amplitude adjustment. Servohydraulics offers, as well, the possibility of obtaining the required data in as few as one cycle, which makes temperature rise during the test negligible.
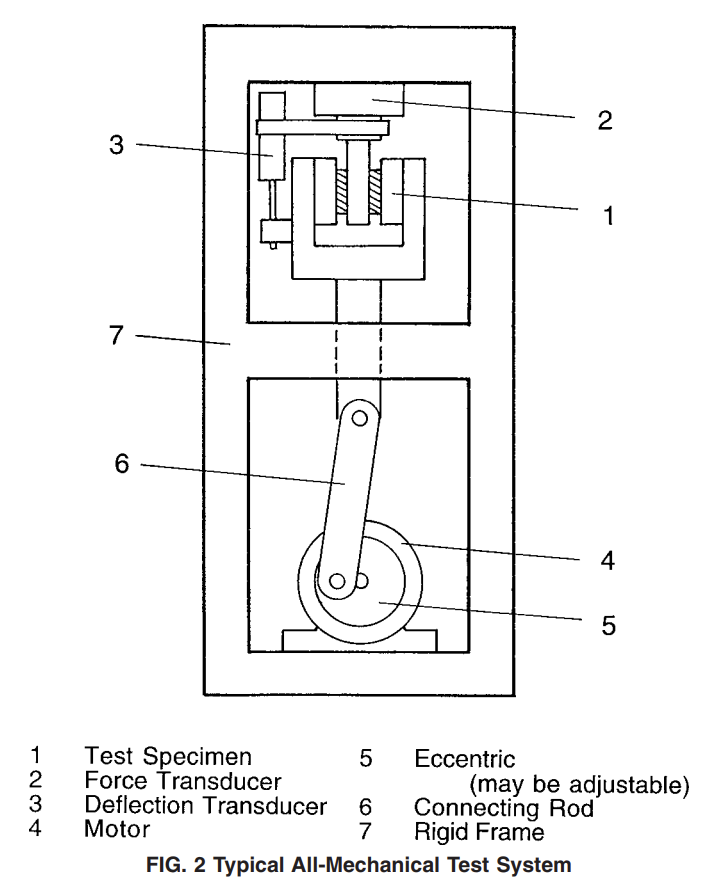
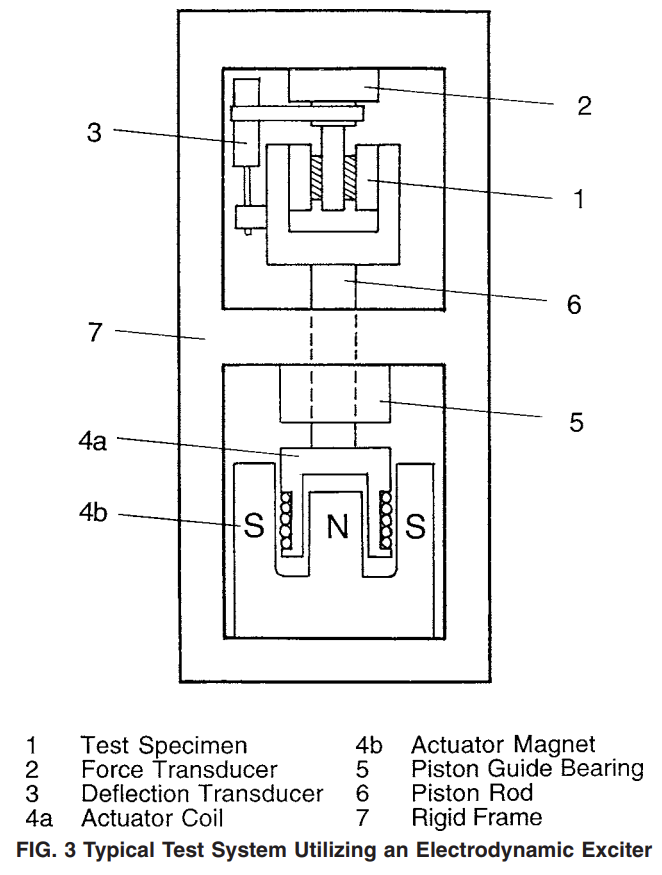
8.2.2 A typical servohydraulic test system is depicted in Fig.1 An all-mechanical system having many of the same features is shown in Fig. 2. The former has the possibility of imposing either motion or force as the input. The mechanical system shown can apply only vibratory motion. Fig. 3 shows an electrodynamically excited system. (All-mechanical machines using rotating weights or oscillating masses to develop sinusoidal forces are possible but are extremely complex, and will not be dealt with here.)
8.3 Free Resonant Vibration:
8.3.1 Any resonant system consists of two essential elements: a spring and a mass. A third element, a damper, may be added to cause decay of the resonant vibration amplitude. In elastomers, the elasticity (springiness) and damping are both inherent in the material. Testing by free resonant vibration
the mass to oscillate freely (hence “free” vibration) at a frequency determined by the stiffness of the specimen and the magnitude of the mass. This frequency of natural oscillation is termed, appropriately, the “natural frequency.”
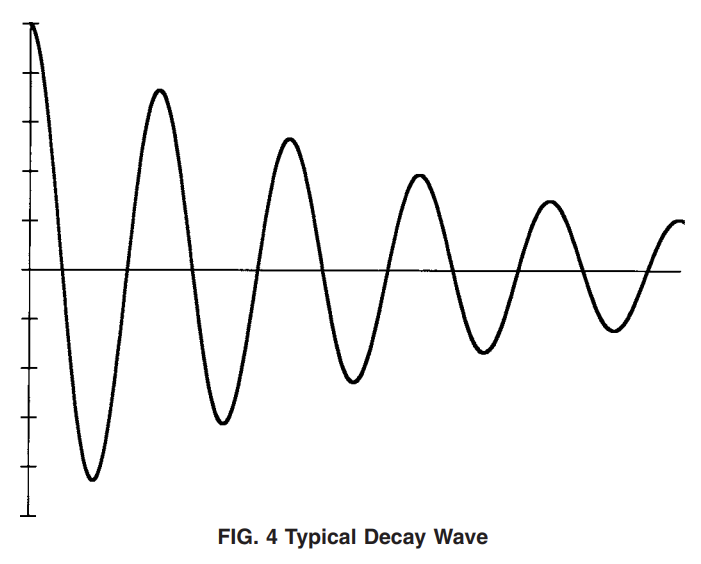
8.3.2 As the mass and spring oscillate, they pass energy back and forth. It alternately takes the form of stored and kinetic energy. Some is lost to damping and is converted to heat. As it is lost, the oscillatory amplitude becomes less and less, or “decays.” By measuring the deflection amplitude of each successive cycle, a measure of damping can be had through the application of the logarithmic decrement, or “log decrement,” for which the symbol is D. Fig. 4 illustrates how the peaks of vibratory response decay with time.
8.3.3 This method has the advantage of requiring little equipment, but suffers the inherent and serious problem of not being able to provide a constant strain amplitude. This poses a problem in determining the influence of dynamic strain on elastic and damping stiffnesses. With highly damped elastomers the technique is difficult to apply because so few cycles are available for use. The equations for logarithmic decrement in terms of the decaying amplitudes assume linearity and that moduli are not influenced by strain amplitude.
8.3.4 The same decay curve from which log decrement is obtained can be used to calculate specimen stiffness. Calculation of log decrement utilized the amplitudes; calculation of stiffness will use the period of oscillation and knowledge of the mass if translational, or of the moment of inertia if torsional.
8.3.5 Appendix X5 explains the method in more detail and gives the equations for log decrement, loss factor, and stiffness.
8.4 Forced Resonant Vibration:
8.4.1 As with the free resonant system, the elastomeric spring with its inherent damping, and a mass, are necessary. This method, however, requires an external source of vibratory energy. Two sources are possible: motion excitation (“shake table”) and force excitation. The shake table case is the easier of the two to implement, and is the only one described.
8.4.2 Traditional texts on vibration theory deal with systems
using purely elastic springs, and viscous dampers. It is important to note the difference between viscous damping and that which occurs in rubber. Force due to viscous damping is proportional to velocity, and hence is a first-power function of frequency; the damping force in elastomers is nearly independent of frequency. To use most textbook equations with elastomeric isolators one must use an “equivalent viscous damping” for the particular frequency of interest, or use an entirely different model. The model based on “hysteretic damping” is a better representation of the damping behavior of typical elastomers. This model is also often referred to as “complex,” “solid,” or “structural” damping.
8.4.3 Absolute and Relative Motions:
8.4.3.1 In considering forced resonant vibration it is important to distinguish between “absolute” and “relative” transmissibility and phase. Absolute transmissibility is the amplitude of the response motion of the supported mass divided by the amplitude of the input motion. Absolute phase is the phase angle between the above two quantities, considered as sine waves. Relative transmissibility is the amplitude of deflection of the elastomeric spring divided by the amplitude of motion of the shake table input. Relative phase is the phase angle between these two quantities, considered as sine waves. The response motion of the supported mass and the deflection of the specimen are entirely different things. Not all texts explain these relationships clearly.
8.4.3.2 Figs. 5-7 show the case of absolute transmissibility and phase. Figs. 8-10 show relative transmissibility and phase. The plots shown are theoretical curves based on mathematical equations; they are not test data. In all of them, “frequency ratio” b is the ratio of the vibration frequency to the undamped natural frequency. Undamped natural frequency is calculated using the mass and the elastic stiffness, using Eq X5.5 or Eq X5.7 (see Appendix X5). On the plots, the undamped natural frequency is denoted by beta = 1.
8.4.4 Hysteretic and Viscous Damping Effects—Absolute
Case:
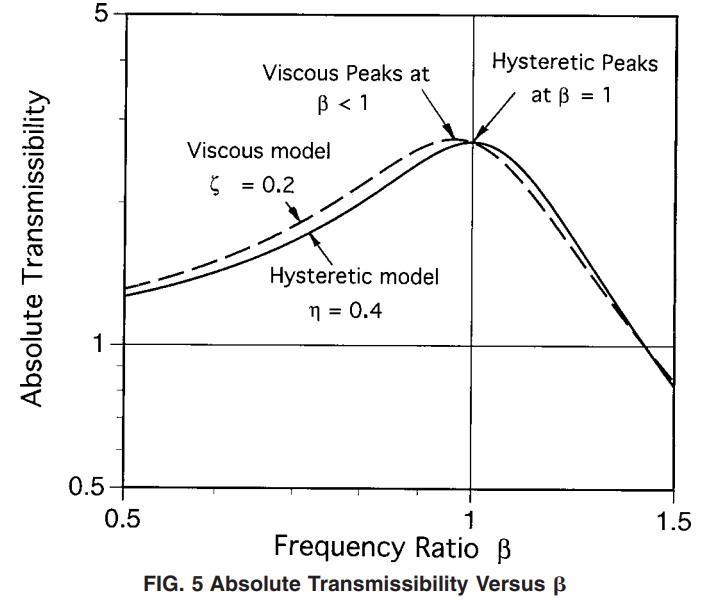
8.4.4.1 The curves for absolute transmissibility and phase are not the same for the viscous and hysteretically damped cases. They differ in two ways: (1) the frequency at which peak amplitude occurs is different, and (2) the slope of the transmissibility curves is different in the isolation range.
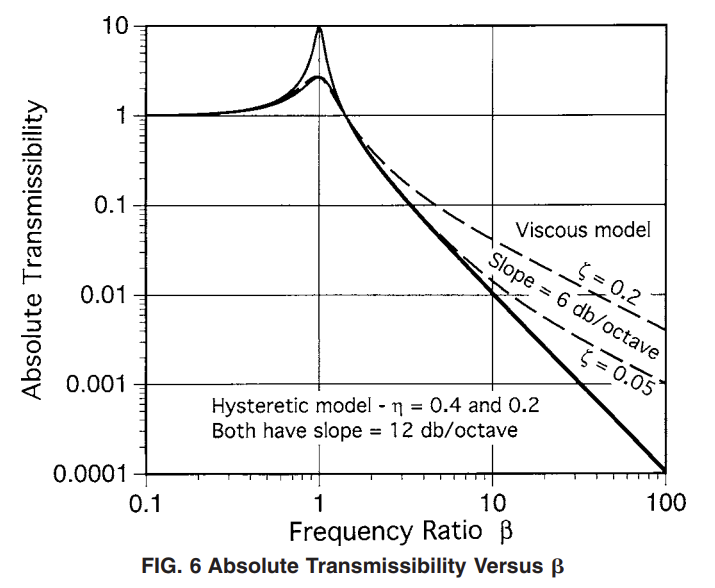
8.4.4.2 Fig. 5 and Fig. 6 show absolute transmissibility for both damping types on the same plots for comparison. The first includes only frequencies near peak transmissibility to show clearly how the peaks occur at different frequencies. The second extends well into the isolation range to show how the slopes differ. Viscous damping causes peak absolute transmissibility to occur at beta less than unity. With hysteretic damping it always occurs at beta = unity. In the range of isolation, the slope
of the hysteretically damped case, typical of elastomeric
vibration isolators, is 12 dB/octave. The slope of the viscous
damped case is 6 dB/octave. Measurement of this slope is one
way to demonstrate that elastomers exhibit hysteretic and not
viscous damping.
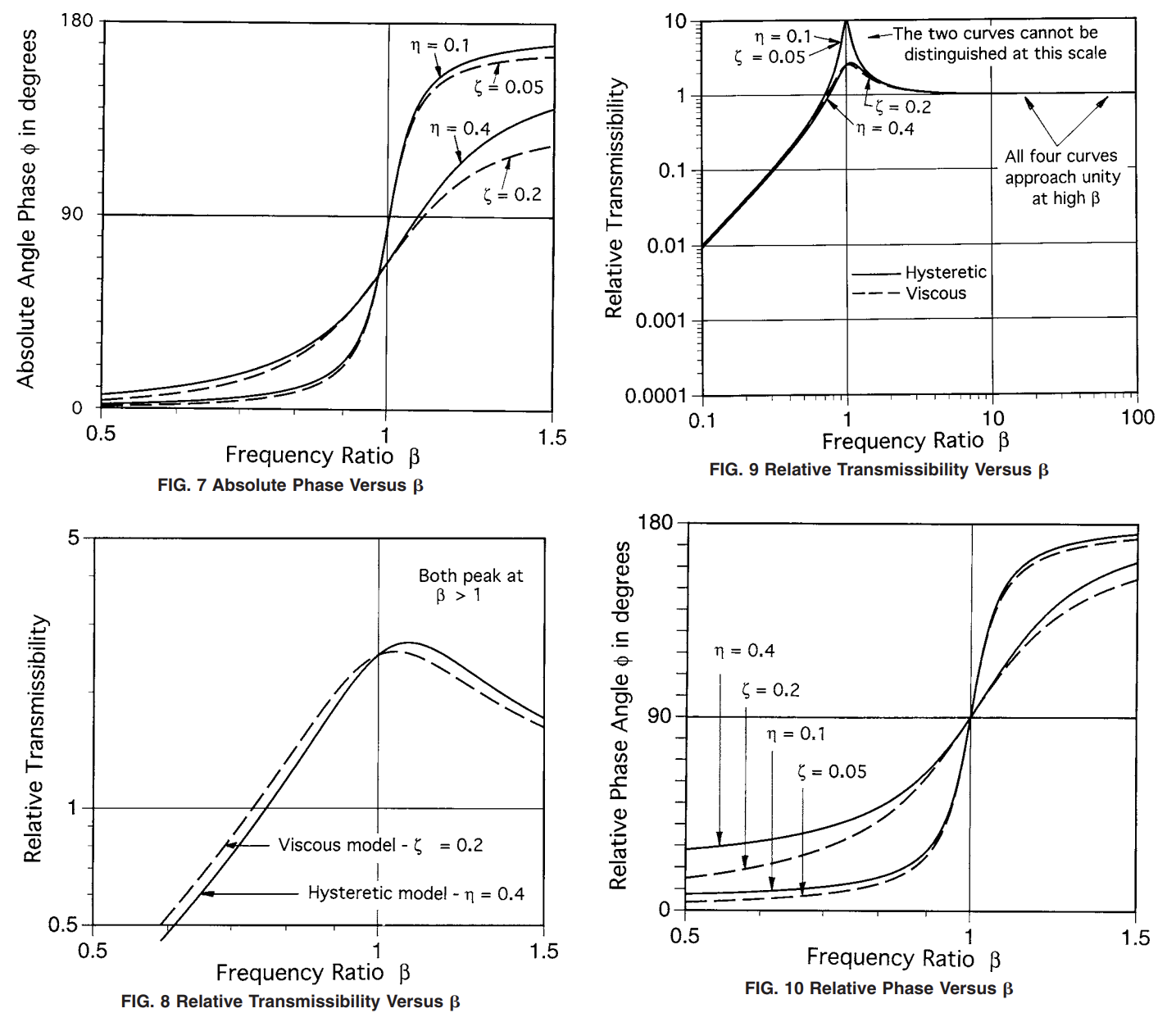
8.4.4.3 Fig. 7 shows absolute phase versus frequency over the smaller frequency span. In this curve it should be noted that 90° phase shift does not occur at beta = unity for either viscous or hysteretic damping.
8.4.5 Hysteretic and Viscous Damping Effects—Relative Case:
8.4.5.1 Figs. 8-10 examine the same relationships for the case of relative transmissibility and phase. Peak transmissibility now occurs above beta = 1 for both viscous and hysteretic damping. But notice that 90° phase shift now occurs at beta = unity for both kinds of damping. Fig. 9 shows that both damping models exhibit a uniform transmissibility of unity at high values of b; the displacement of the specimen is equal to the shake table input since the supported mass is isolated; it is stationary.
8.4.5.2 For the shake table relative transmissibility case, for both hysteretic and viscous models, the relative phase angle at the undamped natural frequency is 90°. From the experimenter’s standpoint, it would be nice to utilize this fact to determine the undamped natural frequency, and from it the elastic stiffness. Unfortunately, measurement of the dynamic deflection of the specimen (the relative motion) is not easily accomplished.
8.4.6 Advantages and Disadvantages of Forced Resonant Method:
8.4.6.1 Determination of dynamic properties over an extended range of frequency is not practical with forced resonant vibration. For a given specimen the only variable available to change the resonant frequency is mass, and it is seldom practical to vary it over a range of more than ten times. This changes the resonant frequency only by a factor of about three (the square root of ten).
8.4.6.2 Compared with free resonant vibration, the forced resonant method has the advantage of allowing the experimenter to adjust for and to maintain a desired resonant amplitude. It has the disadvantage of requiring steady state vibration, and therefore will suffer from internal heat generation within the specimen and consequent change in specimen temperature. See Section 7 on thermodynamic factors and their influence on dynamic measurement.
8.4.6.3 It should also be noted that the shape of the transmissibility curve will be distorted compared to the theoretical curves by any sensitivity of the elastomer moduli to dynamic strain amplitude and/or frequency. Where this influence is significant, changes in the shape of the transmissibility curve can be expected.
8.4.7 Obtaining Loss Factor and Stiffness from Forced Resonant Vibration:
8.4.7.1 Loss factor in general can be determined from the height of the transmissibility curve. Dynamic stiffness in general can be determined from the resonant frequency provided the supported mass (or moment of inertia) is known.
Neither relationship is simple if the elastomer has significant damping, for example where tand is greater than 0.2. X6.1 gives detailed instructions for obtaining loss factor and dynamic stiffnesses from transmissibility curves, and discusses phase.
8.5 Choice of Specimen Geometry for Modulus Measurement:
8.5.1 Thus far, the discussion has been entirely general; the methods described could be used equally well for measurement of dynamic complex stiffness or dynamic complex modulus. Conversion of stiffness results to modulus requires mechanical analysis of the stress and strain in the specimen, since modulus is defined as their quotient. Choosing a specimen geometry depends, therefore, on the degree to which the material is subjected to uniform stress and strain throughout the body of the specimen, and the degree to which this is important for a given measurement.
8.5.2 Elastomers in general are strain sensitive; the dynamic moduli are functions of dynamic strain amplitude. The strength of this relationship varies from compound to compound, becoming more pronounced with increasing stiffness and damping. To the degree that this effect is significant, it implies that the test specimen must be chosen to ensure equal strains at all points within the specimen. 8.5.3 Also implied is that the dynamic strain amplitude must be constant all during the test. This imposes restrictions on the use of free-vibration decay methods, where strain amplitude is constantly changing.
8.6 Double Shear Specimens:
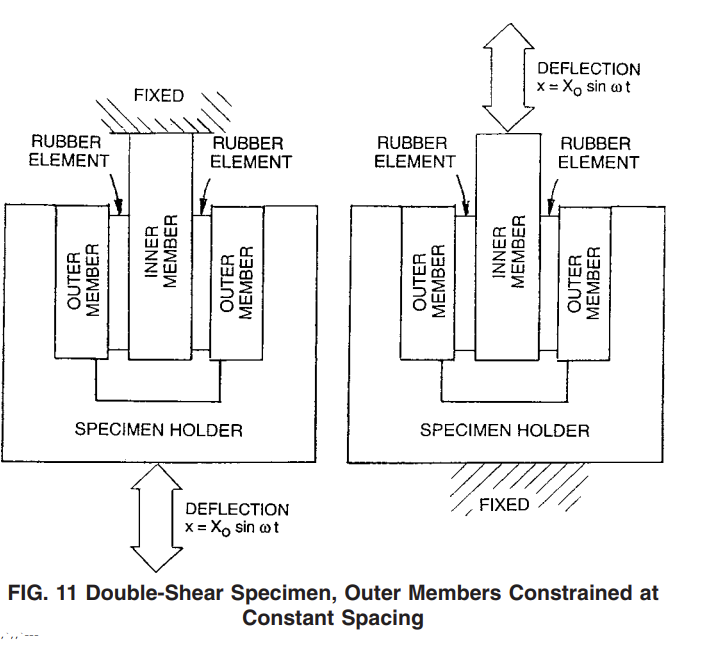
8.6.1 For the reasons cited above, the most widely useful specimen for modulus measurement is the double shear type, tested by a forced nonresonant method. Shear, when the geometry is properly selected and height-to-thickness ratio is large (8 to 10), offers near constant strain throughout the specimen.
8.6.2 Fig. 11 illustrates a typical double shear specimen, having its two outer members clamped in a fixture that constrains them to maintain a fixed spacing between them, and to make them move in unison. Depending on the test apparatus, either the outer members or the inner member may be driven by the moving part of the machine, with the other part held stationary.
8.6.3 For double-shear specimens, the relationship between shear modulus of the material, stiffness of the specimen, and geometry of the specimen is derived in Appendix X2. Derivations for tall rectangular, square, and circular cross sections are given, as are the dimensions of recommended specimens.
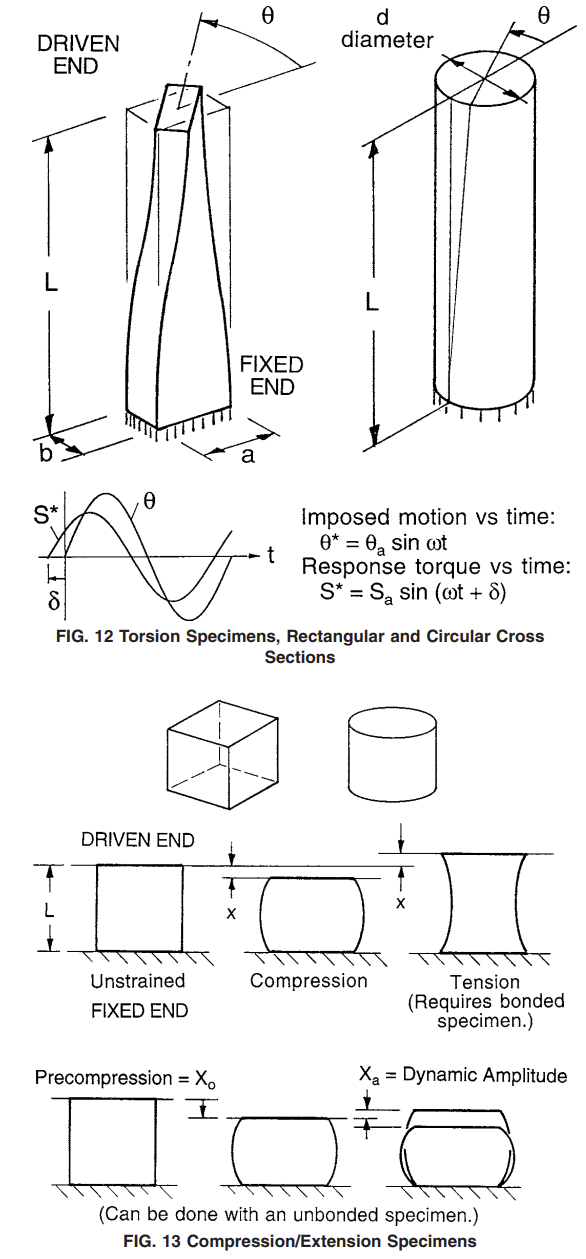
8.7 Torsion Specimens:
8.7.1 Fig. 12 shows rectangular and circular cross section specimens twisted in torsion. The formulas for shear modulus and strain are given in Appendix X3. Both figures are for the case of forced nonresonant vibration.
8.8 Compression/Extension Specimens:
8.8.1 Fig. 13 illustrates rectangular and circular cross section specimens loaded in compression and tension (also called extension). The precompressed specimen can be tested as an unbonded button. Both lubricated and nonlubricated methods are used, the latter often with the aid of sandpaper to prevent the contact surface area from changing as the specimen is deflected.
8.8.2 Appendix X4 gives the derivation of equations for extension modulus E as a function of force, deflection, specimen stiffness, and the dimensions of the specimens. Recommended ratios and dimensions, taken from Test Methods D945, ISO 2856, and DIN 53 513 are given for reference.
8.9 Bending Specimens:
8.9.1 Beams in bending are used in several types of apparatus. The types of machines vary in the constraints to which the specimen is subjected. Fig. 14 illustrates diagrammatically some of the constraint schemes in use. Understanding of the end constraints is necessary in order to select the proper analysis equations. In the types shown, a, b, d, and f have the
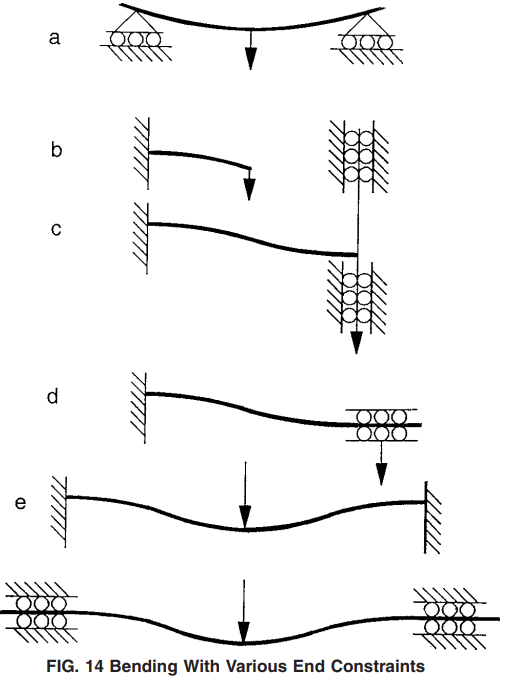
beam length unconstrained; c and e constrain the length to be always at its original length. (The diagrams are schematic; the apparatus may utilize constraints quite different from the roller guides shown.)
8.10 Tradeoffs Between Methods:
8.10.1 There are two main considerations in selecting a test
method: (1) the need for constant strain during the test, and (2)
heat generation during the test.
8.10.2 Nonresonant, motion excited methods offer constant
dynamic input amplitude during the test. Free resonant vibration does not. Of the nonresonant methods, servohydraulics provides the most convenient way to impose a wide variety of test conditions and high forces. (A motion-excited servohydraulic system has its servo loop closed on motion feedback.)
8.10.3 As discussed in Section 7, if the material has significant damping, it may be desirable to acquire the dynamic data in a burst of a few cycles to minimize temperature rise within the specimen. Nonresonant motion excited methods, especially servohydraulics, are able to do this.
8.10.4 In general, methods utilizing free resonant vibration are the least expensive, followed by forced resonant methods. Forced nonresonant methods are the most costly, but offer the most comprehensive results.
8.11 Influences on Accuracy:
8.11.1 The accuracy of a stiffness measurement can be no better than the accuracy of measurement of force and deflection. Of the two, deflection is usually the more difficult, especially at high frequency where displacements become small. Measurement of force becomes a problem as frequency rises, due to mass reaction forces in fixturing, and the smallness of the forces.
8.11.2 The accuracy of a modulus measurement can be no better than the accuracy of measurement of the dimensions of the specimen. The smallest dimension, usually thickness, is always the most critical. Modulus is calculated from stiffness and specimen geometry; specimen dimensions are critical to accuracy.
8.11.3 The accuracy of a damping measurement can be no better than the excellence of the attachment between specimen and test machine. Grips, fixtures, and the like must not allow slipping, which itself is a form of damping and that, if present, will add to the apparent damping.